
3D视觉+协作机器人在空调焊缝3D巡检中的应用
发布时间:2023-09-06 | 信息来源:上海砚拓自动化科技有限公司 | 点击量:1002
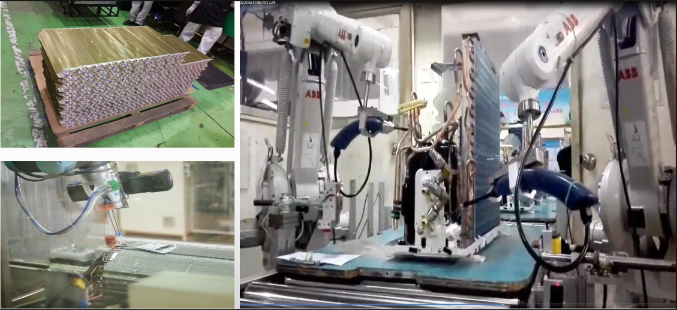
空调铜管焊接后,现有行业都是人工用探测器插入铜管周边进行检测焊接合格与否。由于整个产品,铜管焊接后铜管存在互相交叉,存在不同的弯曲类型,其次,铜管表面反光一致性不高,普通视觉无法做到。
解决方案:
通过3D结构光铜管位姿信息,为机器人探测铜管位置提供定位服务。
精度:±0.5mm
视野:350mm
时间:2S以内
上海砚拓自动化科技有限公司,自成立以来专注于机器视觉产品的代理,研发,生产,销售以及机器视觉系统集成和服务为一体的高新科技企业。公司立足于机器视觉和工业自动化领域,专注于机器视觉和机器人运动控制的完美结合,全力打造视觉高端产品。欢迎来电咨询。
上一篇:3D视觉引导机器人高精度切割
下一篇:轮毂自动化焊缝打磨解决方案
